













 Эта инструкция от взрослого, состоявшегося мужчины (© анекдот), который захотел купить и собрать коптер для FPV полетов по квартире. Как и многие другие, боялся получить одноразовую китайскую игрушку или начать собирать, но бросить, потому что руки растут не из того места.
Эта инструкция от взрослого, состоявшегося мужчины (© анекдот), который захотел купить и собрать коптер для FPV полетов по квартире. Как и многие другие, боялся получить одноразовую китайскую игрушку или начать собирать, но бросить, потому что руки растут не из того места.Результат – глаза боятся, а руки делают. Т.е. не все так сложно, как кажется на первый взгляд.
Примерно год назад появился замечательный коптер TinyWhoop, он был маленьким, шустрым и его легко можно было доработать, однако стоил он немало; как всегда, выручили китайцы и стали штамповать клоны, например: Eachine E010, JJRC H36, FuriBee F36 и т.д. Вот про них мы сегодня и поговорим.
Собирать я решил на базе Eachine E010, параллельно (методом проб и ошибок) выбирая комплектующие с разных сайтов. Для краткости буду называть его тинивупом или просто вупом.
Дальше будет много фотографий.
Постараюсь поменьше описывать свои действия, и почаще приводить ссылки на полезные статьи/описания/отзывы и обзоры.
Для ленивых
Можно выбрать готовый набор:www.banggood.com/Eachine-E010S-65mm-Micro-FPV-Raicng-Quadcopter-with-800TVL-Came-Based-On-F3-Brush-Flight-Controller-p-1119427.html
и не читать 2/3 этой статьи. В таком комплекте есть почти все необходимое: рама, моторы, аккумуляторы, мозг, камера.

Хотя я рекомендую все же прочитать написанное, возможно узнаете что-то новое.
Рама
Рама должна быть одновременно: прочной, гибкой и очень легкой. Если рама не очень прочная и хрупкая – она рассыпается от несильных ударов (летал на коптере 90 класса с напечатанной рамой по квартире, пластик расслаивается, несмотря на хорошее качество печати). Если рама будет слишком гибкой, то при легком ударе будет гнуться и коцаться винтами. Ну и вес – чем тяжелее коптер, тем хуже он летает. Тоже по началу думал +- грамм ничего не значит. Полетал – понял, значит и очень много. Не зря опытные люди борются не просто за каждый грамм веса, а даже за десятые грамма!Рамы:
http://www.gearbest.com/rc-quadcopter-parts/pp_468516.html
http://www.gearbest.com/rc-quadcopter-parts/pp_597689.html
http://www.tmart.com/Main-Frame-for-Inductrix-Tiny-Whoop-Black_p351565.html
http://www.banggood.com/Eachine-E010S-E010C-E010-Micro-FPV-RC-Quadcopter-Spare-Parts-Frame-Kit-p-1126510.html
http://www.banggood.com/Eachine-E010-RC-Quadcopter-Spares-Parts-Frame-p-1081723.html
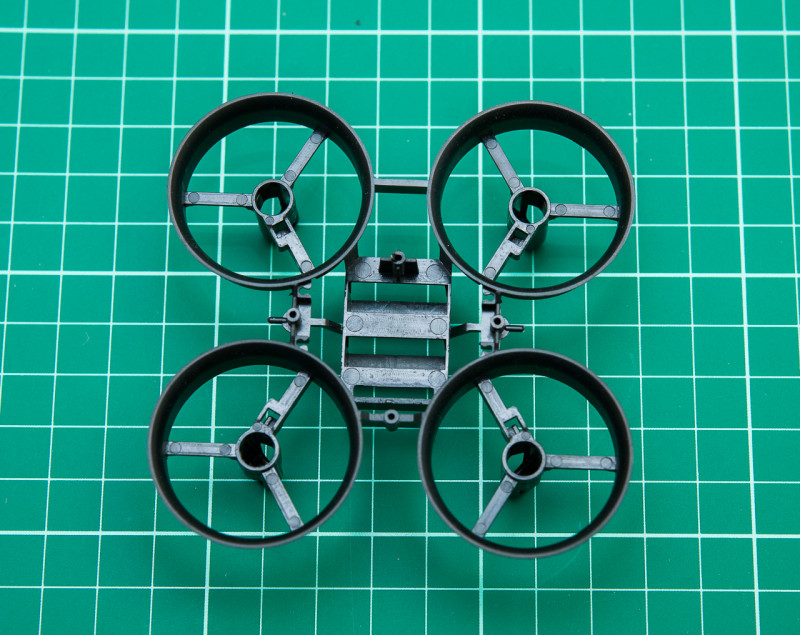
Обратите внимание на форму «спиц»: бывают прямоугольного сечения (перпендикулярны потоку воздуха), как у меня на черное раме, а есть наклоненные (как на белой раме), чтобы уменьшить сопротивление воздуха; говорят дает небольшое увеличение эффективности.
Черная рама с banggood:


Белая рама с banggood:
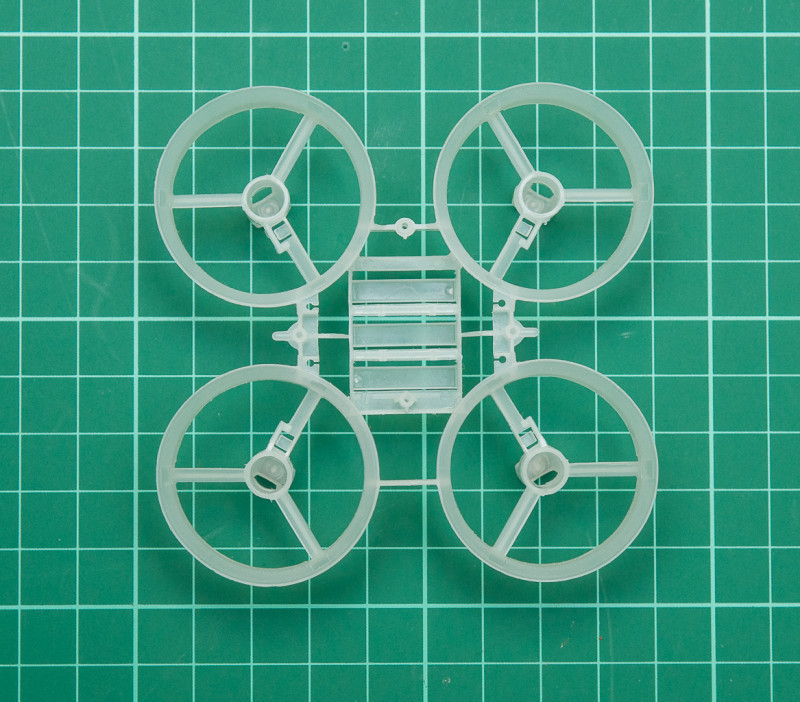
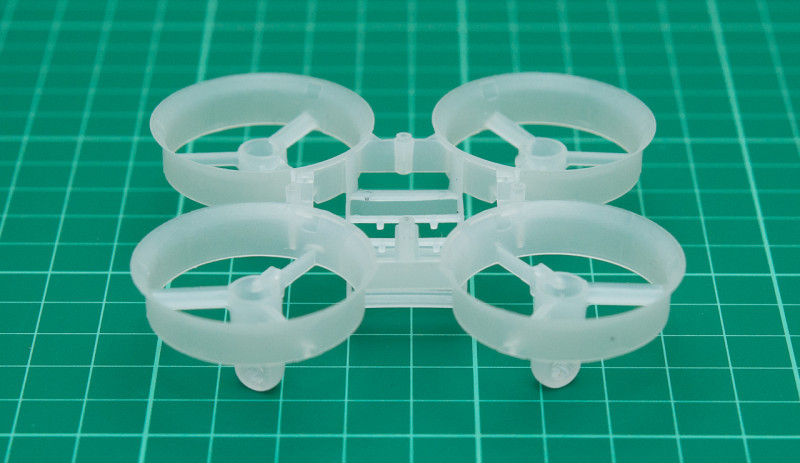
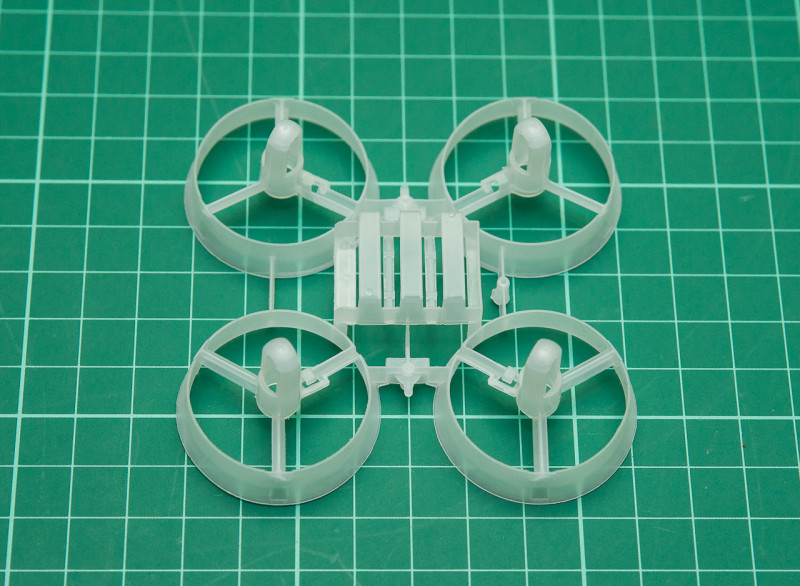
Черная весит 5.6 грамма – это очень много, белая – пришла на днях, еще не опробовал, но сразу: вес 3,8 грамма; сама она более упругая, материал похож на нейлон; «спицы» — под углом.


Почти 2 грамма разницы!
Не всегда стоит верить продавцам, на форуме forum.rcdesign.ru/f136/thread443500.html были разборки с магазином tmart, который обещал рамы весом меньше 4 грамм, а присылал обычные – 5,5-5,7 грамм.
Для уменьшения веса будем подрезать все самое не нужное.
Рамы довольно легко трескаются, черная с BG отлично клеится обычным клеем для пластиковых моделей (в моем случае от фирмы «Звезда»).
Дополнительно:
Обзор квадрокоптера JJRC H36 или Eachine E010
Blade Inductrix FPV — домашний дрон
Полетный контроллер AcroWhoop и рама Eachine E010
Eachine E010 — недорогая альтернатива ТиниВупу (TinyWhoop)
Моторы
Небольшое отступление: я рассматриваю только коллекторные моторы. Про бесколлекторные микрокоптеры расскажет кто-нибудь другой.Маркировка коллекторных моторов очень простая. Это 3 или 4 цифры, которые обозначают размер. Например: 615 или 0615 – это моторы диаметром 6 мм и длиной 15 мм. Часто используются еще 0716 и 8520 (длина 20, диаметр, как ни странно, 8,5 мм); все логично: чем крупнее, тем мощнее. Вот, например, мой предыдущий коптер с напечатанной рамой. Собирался по принципу: я его слепила из того что было. Выглядит ужасно, летает вполне нормально:
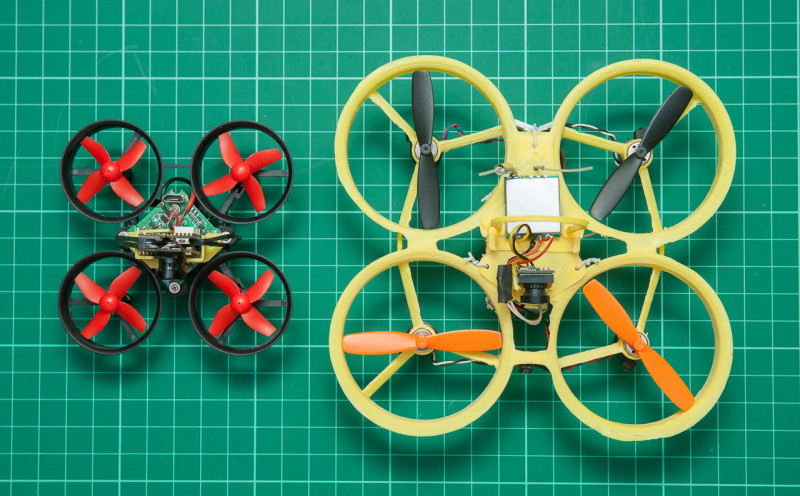
Чем больше вес коптера, тем больше инерция (что логично), тем сильнее последствия столкновений и падений. Жена уже отчитала за царапины на косяке двери :) Летал как раз на этом, «большом», несильно зацепил дверь, защита отогнулась и винты содрали лак с дерева; на мелком летаю значительно дольше и чаще врезаюсь, пока ничего не сломал.
Сейчас стоят такие моторы
http://www.banggood.com/4X-Racerstar-615-6x15mm-59000RPM-Coreless-Motor-for-Eachine-E010C-E010S-Blade-Inductrix-Tiny-Whoop-p-1115473.html


Где-то в пути моторы с tmart: http://www.tmart.com/4pcs-Boldclash-6x15mm-18000KV-Coreless-CW-CCW-Motor-Axis-Aircraft-Model-Aircraft-Motor_p356309.html выбрал на 18000 kv. Кто-то их хвалит, кто-то ругает. Придут – проверю на собственном опыте.
При покупке обратите внимание на провода и разъемы, если вы сомневаетесь в своих способностях, лучше закажите моторы, у которых провода заканчиваются разъемами. Решил рискнуть и припаять, оказалось не очень сложно.
Винты
Винты 4х лопастные. Для увеличения полетного времени советуют обрезать 2 лопасти. Побочный эффект – немного падает тяга. Тут каждый решает сам – летать дольше или резвее. Для новичков без особой разницы, т.к. коптер в любом случае будет казаться очень резким в управлении.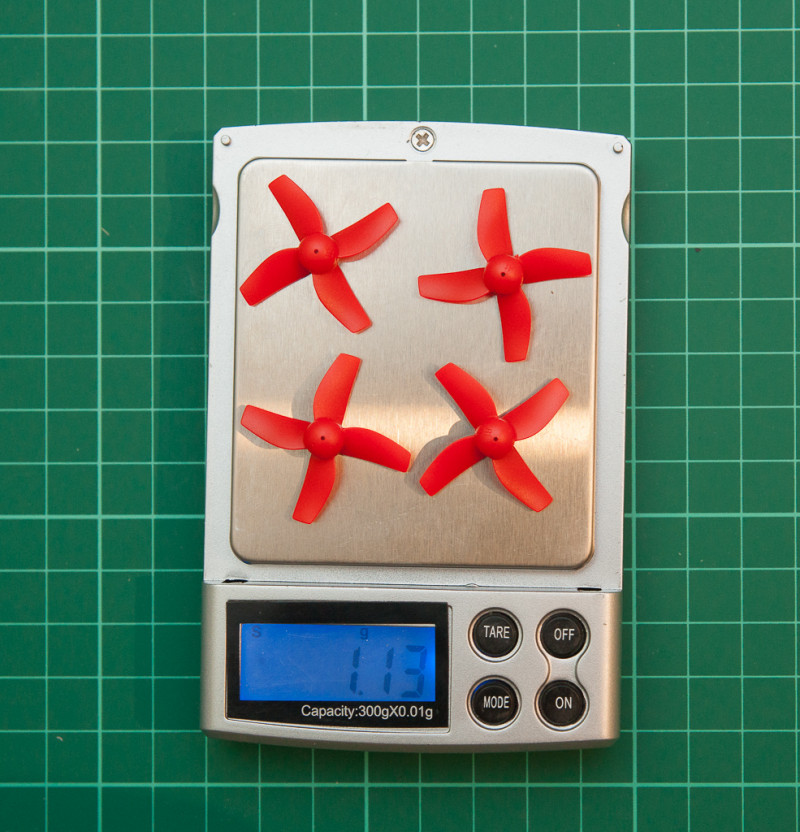
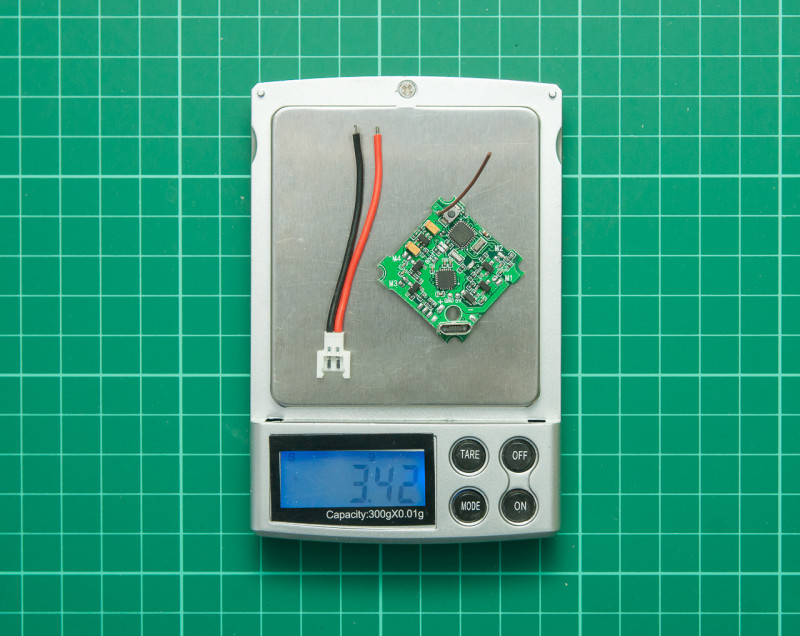
Ради интереса обрезал и взвесил (до и после). Попробовал летать на 2х лопастных, не понравилось, т.к. рама тяжелая и газ висения стал больше 70%.
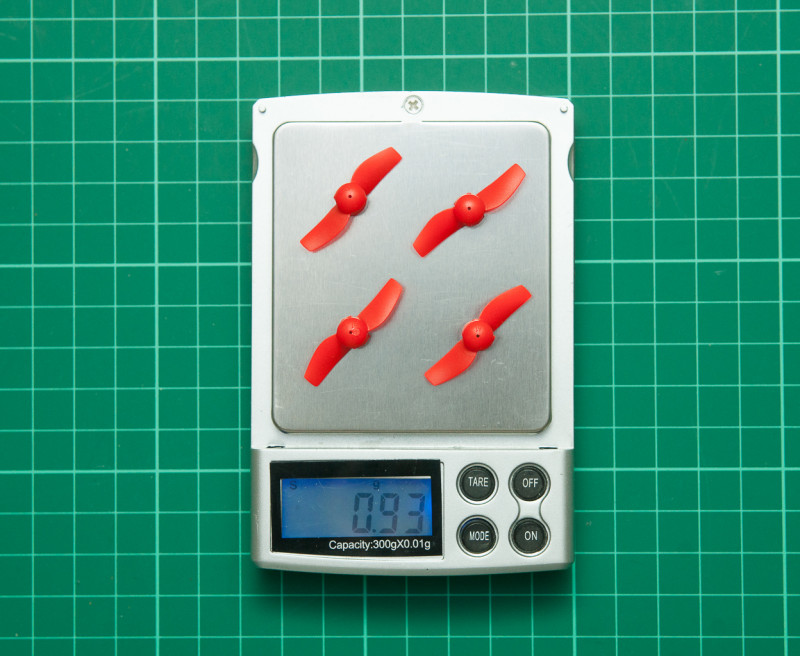
Не стоит обрезать винты, если у вас всего 1 комплект.
Аппаратура управления
Радиоуправляемыми моделями занимаюсь не первый день, поэтому аппа есть, использую футабу 7С и Turnigy 9XR с разными радиомодулями (для коптера FrSky DJT, не самый удачный выбор, лучше брать XJT).
Выбор аппаратуры зависит от двух факторов: бюджета и серьезности намерений. Конкретных советов давать не буду, т.к. выбор довольно большой, а критерии и оценка довольно субъективны. Очень много народу летает на Flysky и на FrSky Taranis (за последний год появились новые модели: Horus — продвинутая и QX7 – упрощенная, обзор раз и два).


Дополнительно: модифицировал свою Turnigy. Телеметрия и переключатель полетных режимов, подробнее:
http://forum.rcdesign.ru/blogs/99365/blog14414.html
http://hobby.msdatabase.ru/project-updates/theresultsofoursurvey/modesw
http://forum.rcdesign.ru/blogs/105113/blog16284.html
Полетный контроллер (ПК)
Выбирая полетный контроллер, в первую очередь нужно смотреть на поддерживаемую аппаратуру управления. Конечно, можно выбрать ПК и внешний приемник, но, как мы помним, лишний вес нам совершенно не нужен.Себе выбрал http://www.banggood.com/F3_EVO_Brushed-ACRO-Flight-Control-Board-For-Blade-Inductrix-Tiny-Whoop-Eachine-E010-E010C-E010S-p-1119214.html
Внимание, в описании ошибка, и нужно прошивка версии SPRACINGF3 не EVO.
Дополнительно: полезная информация, обзоры: раз, два, три
Камера и видео передатчик
На микрокоптеры, как правило, ставят комбо-наборы – камера и передатчик одной сборкой, хотя это просто 2 платы, собранные бутербродом. Для полетов внутри помещений достаточно передатчика на 25мВт, а камера желательна с широким углом обзора.Есть много вариантов, например: TX01, TX03, JF-03, FX798T
http://www.banggood.com/FX-FX798T-5_8G-600TVL-25mW-40CH-Mini-Transmitter-Camera-Combo-For-FPV-Multicopter-p-1053038.html
http://www.banggood.com/Eachine-TX01-PAL-Super-Mini-AIO-5_8G-40CH-25MW-VTX-600TVL-14-Cmos-FPV-Camera-p-1122364.html
http://www.gearbest.com/camera/pp_615070.html
http://www.banggood.com/Eachine-TX03-Super-Mini-025mW50mW200mW-Switchable-AIO-5_8G-72CH-VTX-600TVL-13-Cmos-FPV-Camera-p-1104884.html
Не знал на сколько «зацепят» полеты по квартире, поэтому выбрал TX03 (у нее, в отличие от TX01 и FX798, можно менять выходную мощность), если что, может пригодиться на другом коптере или самолете.

Аккумуляторы
Для микро-коптеров нужны микро-аккумуляторы, способные отдавать совсем не микро-токи. Полетное время в районе 3х минут, а значит ток будет как минимум 20С.Для нашего вупа нужны аккумуляторы емкостью около 150-250 мА*ч. В продаже можно найти разные варианты: и 20С и 45С. Цифрам верить нельзя, особенно китайским, но общее впечатление они дают – аккумулятор 45С с нагрузками будет справляться лучше, чем 30С.
Важно! Обращаем внимание на разъем. В микрокоптерах используется несколько типов разъемов: LOSI
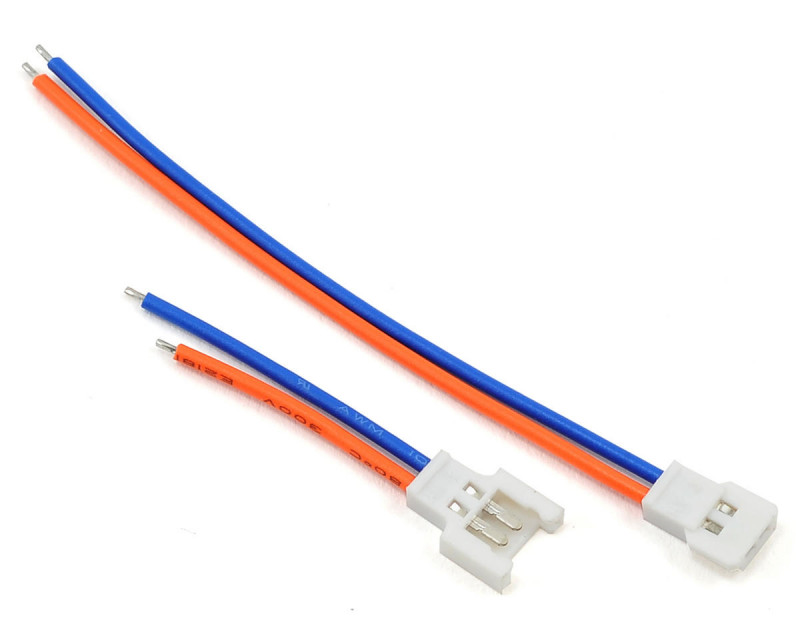
И JST PH с шагом 2 мм.

Конечно, можно купить сами разъемы и переобжать (та еще морока, разъемы очень мелкие), но уж лучше чуть-чуть подумать заранее и сразу выбрать подходящие.
Для себя выбрал такой набор из 5 аккумуляторов:
http://www.banggood.com/5PCS-Eachine-E010S-3_7V-150mAh-45C-Battery-RC-Quadcopter-Spares-Parts-p-1135533.html
Для пробы заказал 1 шт с рейтингом 30С – хорошо что взял всего один. Слабоват.
http://www.banggood.com/JJRC-H20-RC-Quadcopter-Spare-parts-150mah-Battery-p-990497.html
Дополнительно: если не знаете что такое С-рейтинг, какие бывают аккумуляторы, читаем:
Акумы. Виды. Как заряжать. Инструкции на русском и т.п.
Какие бывают LiPo аккумуляторы? Руководство для начинающих пилотов дронов и коптеров.
Зарядное устройство
Очевидно, что не все зарядные устройства одинаково полезны.Зарядник, который шел с аккумуляторами заряжает банки, соединенные параллельно. Чем меньше будет подключено аккумуляторов, тем больше заряда каждого аккумулятора. Чтобы аккумуляторы прожили долго, лучше их не перезаряжать и не насиловать большими зарядными токами.
Самое простое решение — зарядник на микросхеме TP4056. Паять микросхемы не придется, есть готовые платы. Я выбрал самые простые без защиты (она нам не нужна).
На thingiverse довольно много разных корпусов под эти платы. Выбрал вот этот: http://www.thingiverse.com/thing:2105016. Но после печати посмотрел на габариты и не стал его использовать, просто затянул платы в термоусадку.

Кратенько поясню: покупаем платы с TP4056, например:
http://www.banggood.com/10X-TP4056-1A-Lipo-Battery-Charging-Board-Charger-Module-Mini-USB-Interface-p-1053635.html
http://www.gearbest.com/development-boards/pp_154871.html
берем столько, сколько нужно заряжать аккумуляторов. Если сами сомневаемся в своих силах, то просим в любой мастерской заменить 1 резистор на каждой плате. Этот резистор определяет зарядный ток. По умолчанию он около 1 ампера.
Подробнее читаем тут, тут или тут. У меня нашлись резисторы на 8к, что дает ток заряда примерно 170мА — аккумуляторы заряжаются примерно за час.
В качестве преобразователя напряжения берем одну плату типа такой:
http://www.banggood.com/5A-XL4005-DCDC-Adjustable-Step-Down-Module-Power-Supply-Converter-p-923600.html
Она даст 5 В, необходимые для питания плат зарядников.
Припаиваем разъем для подключения к заряднику или большому аккумулятору, выход стабилизатора на вход плат-зарядников.
Очки/шлем
Довольно много споров что лучше очки или шлем, каждый решает сам.Идеальный вариант – перед покупкой попробовать и то и другое. У меня есть Fatshark Base (далеко не новые очки) и шлем Eachine VR D2. Я очкарик с близорукостью и небольшим астигматизмом; у фатшарков использовал линзы -2 диоптрии, все отлично видно.
После очков в шлеме было неудобно первые минут 10. Потом привык. Мои очки под шлем не лезут, но и без очков я никакого дискомфорта не испытываю.
Писать 1001-й обзор шлема думаю смысла нет, просто фото и краткое описание.

Основной плюс, особенно для новичков – комплект содержит все необходимое: сам шлем, антенны для приемников (два типа: клевер – всенаправленная антенна с круговой поляризацией, патч – направленная антенна с линейной поляризацией), аккумулятор, зарядник и даже салфетки для протирки. Ну разве что MicroSD карточку придется докупить, чтобы воспользоваться встроенным DVR.
Подробно можно прочитать тут или про обновленную версию, там же есть и инструкция на русском языке.
Дополнительно:
Сравнение разных шлемов/очков
Форум. Мучительный выбор очков для фпв...
Еще один обзор и сравнение недорогих шлемов для FPV
Собираем
Общая фотография перед сборкой (на момент сборки еще не получил нужные аккумуляторы, поэтому первые полеты были с аккумуляторами от Hubsan H107L на 240 мАч, 20С)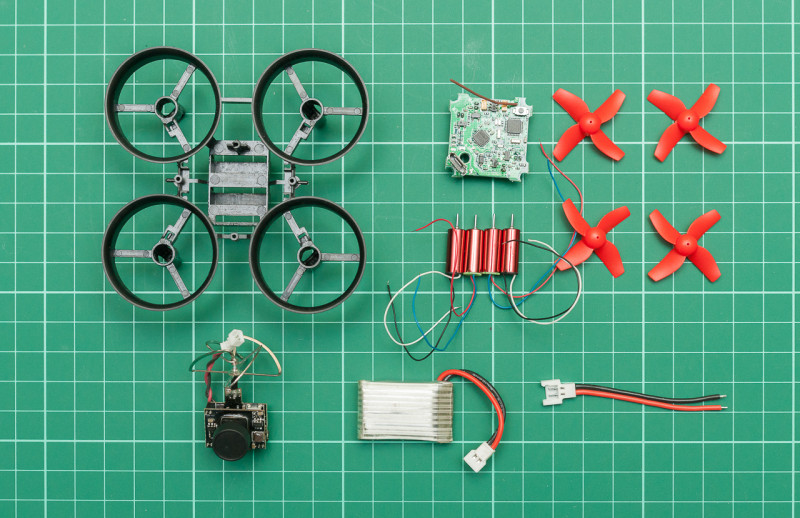
Вставляем моторы на место, не забывая про направление вращения. Я планирую использовать Betaflight, поэтому порядок моторов должен быть такой:
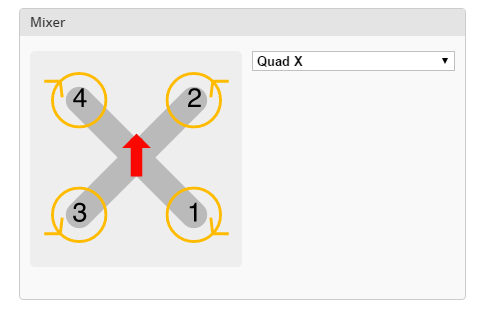
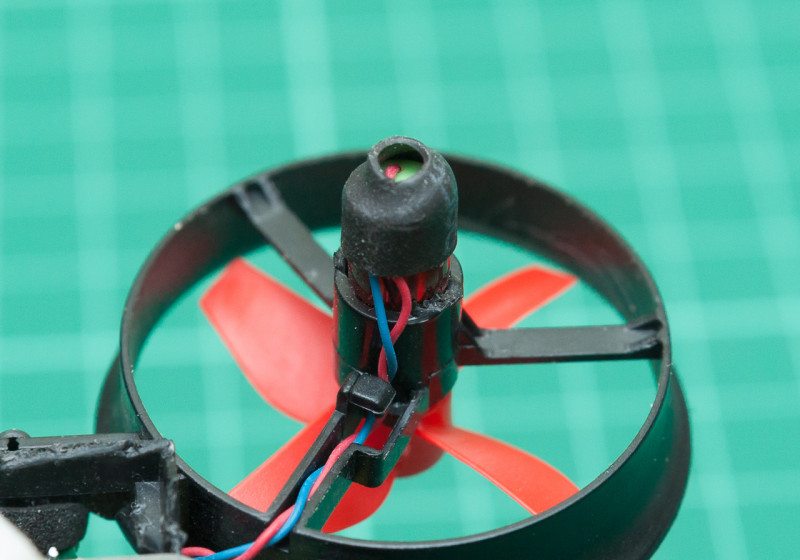
Моторы двух видов: вращаются по часовой стрелке (CW) и против часовой (CCW). Теоретически могут вращаться в любую сторону, но из-за особенностей конструкции щеток, при вращении «в неправильную» сторону ресурс очень сильно падает, либо они почти сразу ломаются. Поэтому, смотрим внимательно: те что вращаются по часовой стрелке (смотрим сверху) имеют красный и синий провода, те что вращаются против часовой стрелки имеют проводки черного и белого цветов.
Свиваем провода и прокладываем в раме.
Примеряем полетный контроллер и обрезаем провода, так чтобы удобно было паять.
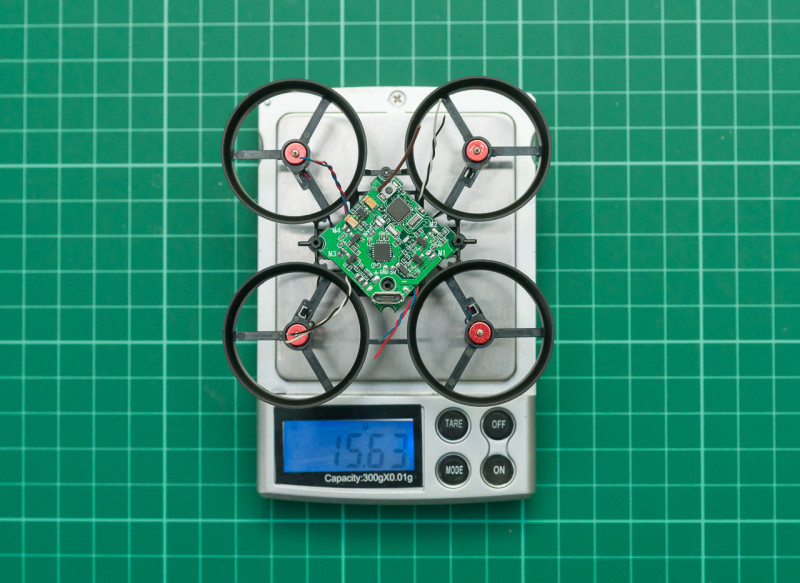
Вес растет.
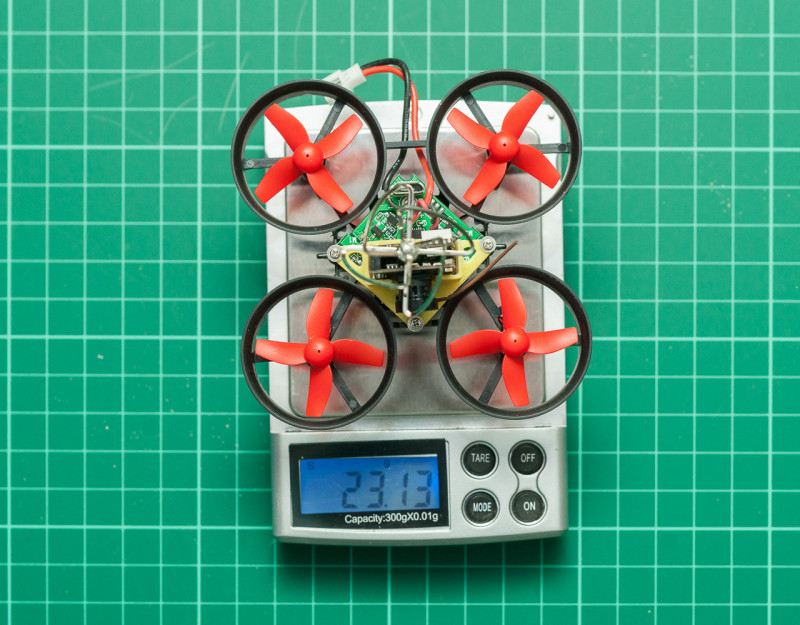
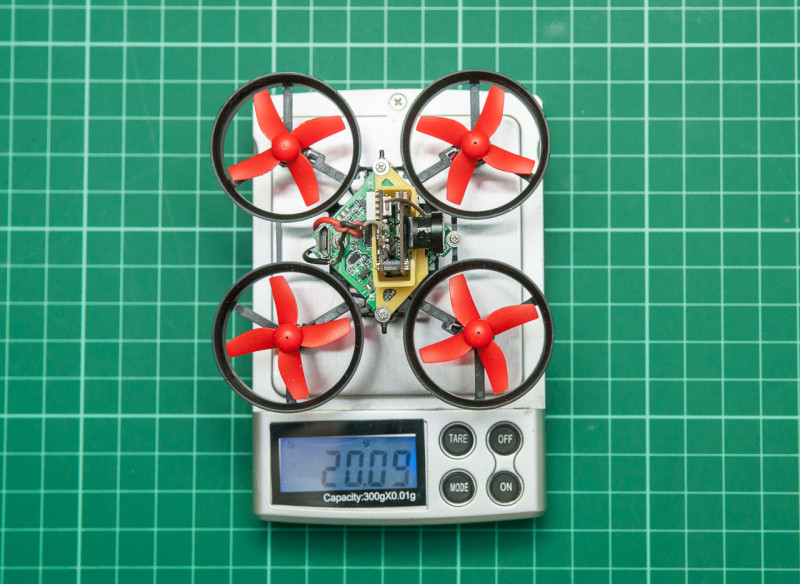
Припаиваем провода от моторов, ставим крепеж камеры, припаиваем провод питания камеры и проводок с разъемом для подключения аккумулятора. Ставим винты, взвешиваем все это дело и ужасаемся. :)
Пробуем взлететь. Со стареньким аккумулятором 240 мАч 20С газ висения примерно 90%. Начинаем борьбу за вес.
Антенна – клевер, у нее круговая поляризация, весит много, кроме того, конструкция достаточно жесткая, поэтому легко ломается. Отпаиваем антенну, берем кусочек тонкого коаксиала (от любой ненужной антенны сосиски, или от старого телефона, wifi роутера и т.п.). Снимаем изоляцию, отмерив от края 13 мм. Аккуратно обрезаем оплетку, чтобы осталось 13 мм центральной жилы в изоляции. Припаиваем полученную антенну вместо штатного клевера.

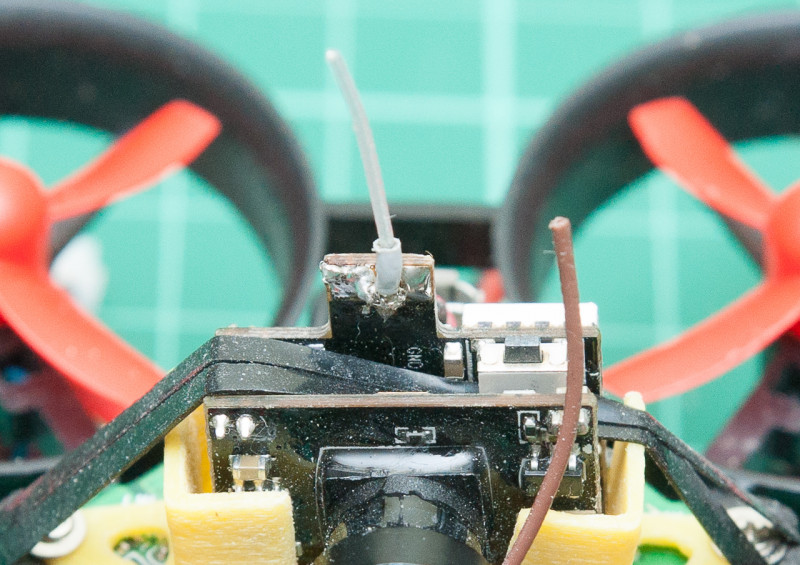
Получили отличное решение – вес меньше, гибкость сильно лучше.
Идем дальше. Берем раму, отламываем корзину для аккумулятора (аккумулятор будем крепить на резинке). Дополнительно отламываем «защиту» винтов, вместо нее оденем термоусадку (она защитит провода, выходящие от мотора и немного поработает амортизатором).
Еще раз взвешиваемся.
Немножко радуемся полученному результату.
Небольшой лайфхак: крепление аккумулятора. Обнаружил у жены резинки для волос. Материал больше похож на силикон. Довольно прочные и эластичные. Купленные в офлайне – прозрачные, на алиэкспресе – черные, показалось что прозрачные более эластичные, чем черные.
https://www.aliexpress.com/item/32681541289/32681541289.html
Весят совсем не много, а по размеру подошли просто отлично.
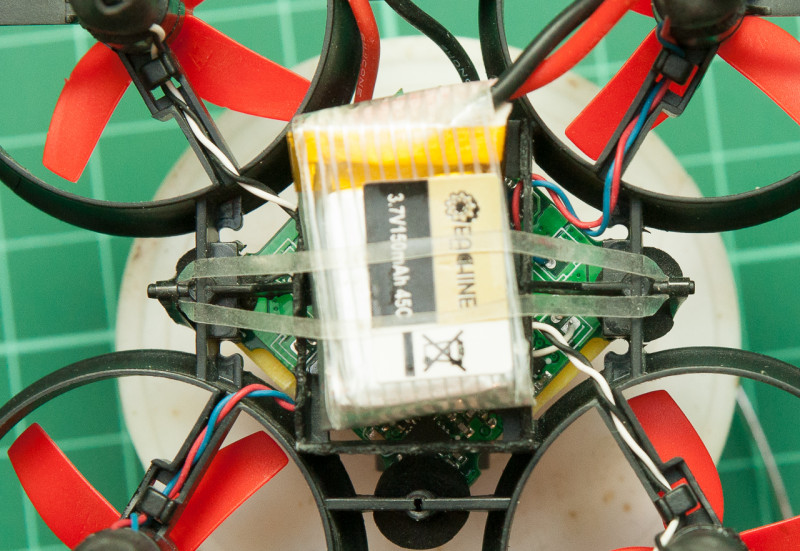
Одна резинка держит аккумулятор, вторая — прижимаем камеру.

30 резинок весит 1,76 грамма. Всего в упаковке 280 (двести восемьдесят!) штук за 40 (сорок!) рублей с учетом доставки.
Настраиваем
У моего полетного контроллера USB порт торчит вверх, очень удобно подключать. Про другие ПК читал, что приходится подрезать раму, чтобы добраться до него, либо просто неудобно использовать. На это стоит обратить внимание при покупке.Прошить решил Betaflight. Подробно процесс описывать, наверное, нет смысла, поэтому только в кратце: ставится расширение для браузера Chrome:
chrome.google.com/webstore/detail/betaflight-configurator/kdaghagfopacdngbohiknlhcocjccjao?hl=en
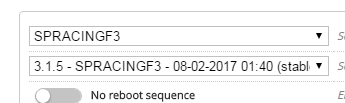
Прямо из приложения можно прошить контроллер, а потом и настроить его. Еще раз, тот контроллер что я выбрал нужно прошивать, используя SPRACINGF3 не EVO.
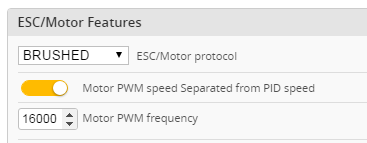
Не забываем выбрать тип мотора BRUSHED
И настраиваем режимы
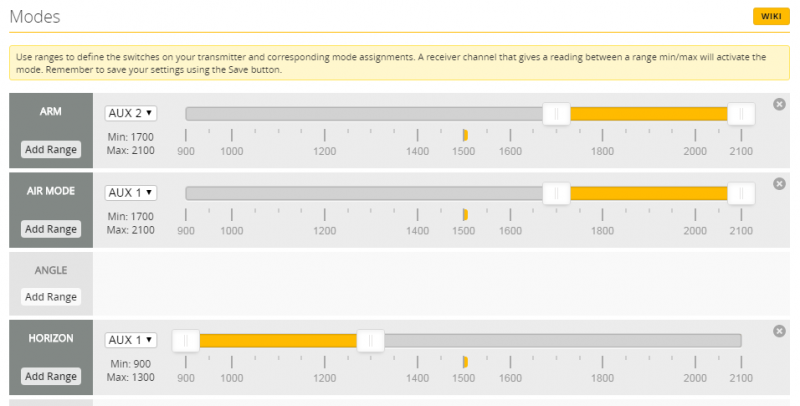
За основу я взял ПИДы отсюда. Коптер колбасило при снижении, был перелет по яву; подправил немного — летает нормально. Рейты и другие настройки я показывать, пожалуй, не буду, чтобы не позориться :) летаю пока медленно и печально.
Дополнительно:
ПИД для квадрокоптеров
Основы настройки ПИД контроллера с помощью логов Blackbox
ПИД-регуляторы – для чайников-практиков
Перевод статьи «Просто о ПИД-алгоритмах»
Учимся
Уже хочется летать, но пока рано. В первую очередь лучше попробовать свои силы в симуляторе. Сколько в нем летать — каждый решает сам. Если никогда не летали на коптере (самолетный опыт не в счет!). Берем симулятор в руки и полетели! Хотя бы базовые навыки нужно получить.
Симуляторов очень много, реалистичность у них разная. Читаем обзоры, качаем бесплатные, если этого мало — покупаем то, что нравится.
Сравнение разных симуляторов
Еще одно сравнение
И еще одно сравнение
Полетели
Помним про безопасность полетов.- Коптер хоть и маленький и взрослым не страшен, но рядом могут быть дети/кошки/собаки/хомячки и т.д., а волосы и шерсть имеют тенденцию наматываться на винты
- На вздувшихся аккумуляторах не летаем
- Вздувшиеся аккумуляторы не заряжаем
- Вообще все аккумуляторы заряжаем под присмотром и там, где риск пожара минимален, по возможности используем специальные огнестойкие пакеты для аккумуляторов
http://www.banggood.com/Realacc-New-Model-Lipo-Battery-Explosion-Proof-Bag-10x12cm-for-RC-Quadcopter-Battery-p-1054590.html - Старые или/и поврежденные аккумуляторы разряжаем и утилизируем

Порядок действий (если что упустил дополните в комментариях):
- Визуальный осмотр: винты на месте, ничего не треснуло, не отвалилось
- Включаем очки (они помнят на каком канале в прошлый раз работали) смотрим на белый шум, значит никто из соседей не летает, и мы никому не помешаем :)
- Включаем аппу
- Подключаем аккумулятор к коптеру
- Если пару дней не летал, или что-то делал с коптером, то очки не одеваю, армлю коптер и проверяю нормально ли вращаются винты, иногда чуток подлетываю визуально
- Одеваю шлем/очки. Полетели.
Первые полеты по квартире, ПИДы еще толком не настроены (судя по тряске).
Видео прекрасно демонстрирует навыки начинающего пилота и еще незаконченный ремонт в квартире :)
Всем удачных полетов!
UPD: Бюджет.
Рама + моторы + винты + контроллер + камера = $55
Аппаратура управления ~$50, лучше что-то типа FrSky QX7 — $110
Очки/шлем = $80 (можно проще и дешевле, но имхо VR D2 — оптимальный вариант)
Дополнительные аккумуляторы: ~$15 (за 5 шт)









