Оригинал: ROSA Fresh R11
Автор: Robert Rijkhoff
Дата публикации: 6 мая 2019 года
Перевод: А. Кривошей
Дата перевода: июнь 2019 г.
- один из форков закрытого ныне дистрибутива Mandriva (другой известный форк - Mageia). Помимо бесплатной десктопной операционной системы, ROSA также выпускает различные версии корпоративных серверов и ряд коммерческих решений для «сверхсекретных данных». Для этого обзора я попробовал бесплатную домашнюю редакцию.
Установка
Первым препятствием, которое мне пришлось преодолеть, была загрузка ISO-образа. ROSA родом из России, и когда я впервые посетил , я обнаружил, что раздел сайта на английском языке довольно ограничен. Например, на главной странице редакции home показаны примечания к выпуску старых выпусков ROSA (R8 и R9), а ссылка на скачивание привела меня на страницу, написанную на русском языке. К счастью, названия доступных настольных сред на странице загрузки приведены на английском языке, поэтому получить правильный образ ISO не так уж сложно.
Примерно в середине процесса я наткнулся на отдельный домен ROSA для англоязычного рынка: . Раздел загрузок для этого домена на английском языке, но в нем нет ROSA Fresh R11 (самая последняя версия - R10). Точно так же самая последняя новостная статья относится к декабрю 2017 года. Похоже, что веб-сайт больше не поддерживается (что также может объяснить, почему домен не имеет сертификата SSL).
ROSA предлагает ISO-образы для четырех разных сред рабочего стола, и для каждой версии вы можете загрузить 32- или 64-битный образ. Интересно отметить, что первой в списке средой рабочего стола является KDE4 (последний стабильный выпуск которой состоялся в августе 2015 года). Далее следует KDE Plasma, за которым следуют LXQt и Xfce.
Я выбрал 64-битный ISO-образ с Plasma , размер которого составляет 2,2 ГБ. Загрузка с ISO-образа предоставляет вам графическое меню загрузки, в котором первый вариант - «Boot from local drive». Эта опция пытается загрузить операционную систему, установленную на вашем компьютере, что в моем случае привело к ошибке «boot failed». Кажется странным, что по умолчанию не загружается ROSA - при загрузке с ISO вы, вероятно, хотите протестировать и/или установить образ.
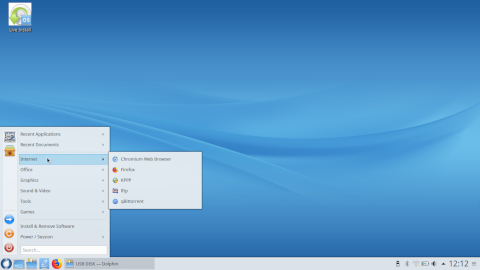
После перезагрузки моего ноутбука я попытался запустить ROSA в live-сессии. Все сработало, как и ожидалось, и мне очень нравится собственная тема ROSA («ROSA Desktop Fresh»). Она чистая и несколько традиционная, с единственной панелью внизу экрана. Меню приложений можно запустить, щелкнув логотип ROSA на панели или нажав клавишу super. Само меню выводит список приложений в традиционном дереве и включает поле поиска, которое автоматически получает фокус (так что вы можете сразу начать поиск в меню).
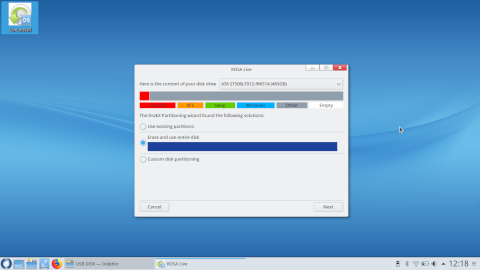
Установщик может быть запущен изнутри live-сессии. Первым шагом является разбиение жесткого диска (возможно, лучше всего сначала сделать самую страшную часть). Вы можете использовать существующие разделы, позволить ROSA захватить весь диск или создать пользовательские разделы. Когда вы разрешите ROSA забрать весь диск, вы получите раздел подкачки (4 ГБ, в моем случае), корневой раздел 20 ГБ и домашний раздел, занимающий оставшееся пространство. И корневой, и домашний разделы используют файловую систему ext4.
Когда я впервые установил ROSA, я не заметил, что опция шифрования жесткого диска доступна только при создании пользовательских разделов. Поскольку я устанавливал ROSA на ноутбуке, я хотел использовать шифрование, и поэтому я переустановил ROSA вскоре после завершения установки. Настраиваемое разбиение было интуитивно довольно понятным: я мог создать загрузочный раздел и физический том LVM, в котором я мог бы настроить раздел подкачки и разделы XFS для корневого и домашнего разделов.
После создания разделов ROSA начинает копирование файлов на жесткий диск. Пока установщик занят, вы можете посмотреть несколько слайдов. Большинство дистрибутивов используют такие слайды, чтобы сообщить новым пользователям, где найти помощь или какие приложения они могут захотеть установить, но ROSA просто отображает лозунги, такие как «A Russian Linux developer company» и «Russian distro of European origin».
Затем вам нужно выбрать, куда вы хотите установить загрузчик (опция по умолчанию, вероятно, будет правильной) и установить количество секунд, по истечении которых будет загружаться образ по умолчанию (по умолчанию - пять). На остальных экранах вы устанавливаете пароль root, создаете учетную запись пользователя и выбираете, хотите ли вы включить CUPS, Samba и SSH. Я обнаружил, что установщик имеет хороший баланс между простотой и предложением различных расширенных возможностей.
Первые впечатления
Последовательность загрузки ROSA в основном графическая. В меню GRUB используется фирменный стиль ROSA, и если вы решили зашифровать жесткий диск, вам будет предложено красивое поле ввода для ввода вашего пароля. Процесс загрузки не всегда радует глаз; вскоре после запуска Plymouth (приложения, обеспечивающего графический процесс загрузки) я получил много белого текста на черном фоне.
Экран входа в систему предоставляет вам все обычные параметры (выбрать среду рабочего стола, выключить/приостановить и т. д.), и вы увидите приятную анимацию во время загрузки рабочего стола. Что мне нравится в экране входа в систему, так это то, что ваши клавиши яркости и громкости работают как положено. В некоторых средах рабочего стола эта функция по-прежнему отсутствует, а это означает, что вам необходимо войти в систему, чтобы изменить яркость экрана или отрегулировать громкость.
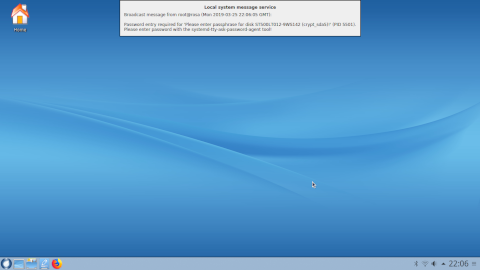
Рабочий стол, который вы получаете после установки ROSA, почти такой же, какой вы видели в live-среде. Единственное отличие состоит в том, что значок установки на рабочем столе был заменен значком «Home», который предшествовал эпохе material design, но в остальном все одинаково. Как я уже сказал, мне нравится внешний вид рабочего стола Plasma от ROSA: он выглядит традиционным и функциональным. Единственное, в чем я не уверен, так это в Windows-подобных элементах управления окнами. Для тех, кто предпочитает более современный внешний вид, доступны темы Breeze и Oxygen.
Вскоре после входа в систему я также столкнулся с первой из множества мелких неприятностей: в верхней части экрана появилось уведомление о том, что я должен ввести свой пароль LUKS для расшифровки жесткого диска. Предупреждение явно было бессмысленным, так как я бы не смог использовать ROSA, если бы не расшифровал жесткий диск во время процесса загрузки. Тем не менее, это предупреждение будет регулярно появляться во время моего теста.
Более приятным сюрпризом стало то, что заставка включается только после 60 минут бездействия. Любой другой дистрибутив, который я пробовал, устанавливает по умолчанию что-то вроде пяти минут, что лично меня слегка раздражает.
Программы
Выбор предустановленного программного обеспечения ROSA прагматичен. В основном вы получаете приложения KDE/Qt, такие как файловый менеджер Dolphin, музыкальный проигрыватель Clementine, текстовый редактор Kwrite и видеоредактор Kdenlive. Другие приложения включены, поскольку они предположительно считаются лучшим инструментом для работы: вы получаете веб-браузеры Firefox и Chromium, GIMP (для редактирования изображений) и полный пакет LibreOffice. Вы также получаете поддержку мультимедиа из коробки, включая плагины Flash для Firefox и Chromium. Я не слишком заинтересован в последнем, но мне было приятно, что я могу воспроизвести любой медиа-файл без необходимости искать кодеки.
Рабочий стол Plasma и большинство приложений относятся к концу 2018 года. Например, ROSA поставляется с Plasma 5.14.4 и LibreOffice 6.0.7 (оба выпущены в ноябре 2018 года). Ядро Linux имеет версию 4.15.0 (январь 2018 года), а systemd - версии 230 (март 2017 года). Я не уверен, почему ядро и система инициализации так стары, думаю, что это результат того, что ROSA ориентирована в первую очередь на корпоративных клиентов.
Следует отметить, что ROSA также поставляет три своих собственных приложения: ROSA Media Player - это форк MPlayer, ROSA ImageWriter - основной инструмент для записи ISO-образов на USB-устройство, ROSA Freeze - это приложение, которое описывается в репозитории как "старый файловый архиватор и распаковщик, который больше не используется ". На самом деле кажется, что два других приложения ROSA также довольно старые - у обоих не было никаких обновлений в течение нескольких лет.
Управление пакетами
Программное обеспечение может управляться через Rpmdrake или из командной строки. Rpmdrake выполняет свою работу, но не настолько удобен для пользователя, как другие программы, называемые сегодня «центром приложений» или «магазином программного обеспечения». Rpmdrake организует пакеты по категориям, и вы можете ограничить поиск типами пакетов, такими как «Пакеты с графическим интерфейсом» или «Мета-пакеты». Вы можете получить больше информации об отдельном пакете, щелкнув по его имени, и вы можете выбрать пакеты для установки, установив флажок.
Поиск пакетов может быть немного сложным. Вы часто получаете очень большое количество результатов, что затрудняет поиск того, что нужно (в частности, если вы не совсем уверены в точном названии). В других случаях поиск не дал результатов - например, при поиске «password» не было найдено ни одного менеджера паролей, даже если такие приложения, как KeePassX, доступны. Я не смог найти способ поиска строк как в имени пакета, так и в описании, и выбор «Help» из меню «Help» вернул «unknown error».
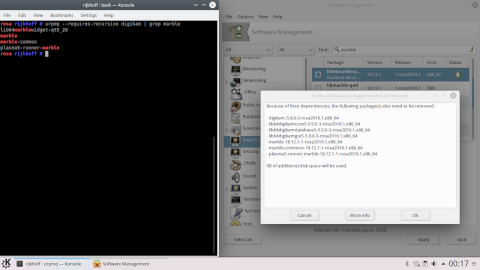
Репозитории ROSA довольно большие - любой пакет, который я хотел установить, был доступен. Хотя установка программного обеспечения работала не всегда. Например, я не смог установить VLC, потому что не удалось разрешить одну из его зависимостей и не удалось запустить браузер Tor из-за отсутствия модуля. Другое программное обеспечение будет установлено, но с неприятными сюрпризами. Когда я установил DigiKam, у меня также появилось приложение под названием Marble (я не понимаю, почему «виртуальный глобус» является зависимостью менеджера фотографий), почтовый клиент KMail имел 175 зависимостей и добавил шесть разных записей в меню приложения.
Мне было интересно управлять программами в командной строке, но там я столкнулся с другой проблемой: я понятия не имел, что использует менеджер пакетов ROSA. Дистрибутив ROSA поставляется с очень небольшим количеством документации, и, как уже отмечалось, ее веб-сайт имеет довольно ограниченный раздел на английском языке. Только после того, как у меня появилась блестящая идея проверить, какой менеджер пакетов использовал Mandriva, я узнал, что ROSA использует менеджер пакетов urpmi. Я не был знаком с urpmi, но после небольшого чтения мануалов я смог избежать Rpmdrake.
Насколько я могу судить, ROSA не поддерживает пакеты Snap и Flatpak. Я мог бы установить несколько простых пакетов AppImage, но более крупные приложения, такие как DigiKam, Geany и VLC, неизменно не запускались.
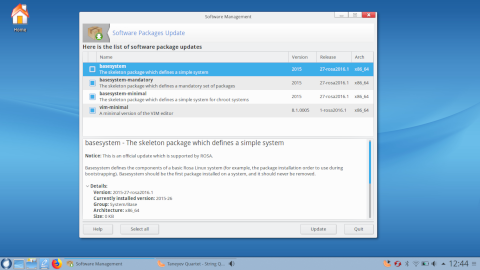
Что касается управления программным обеспечением, ROSA показывает уведомление, когда доступны обновления программного обеспечения. Обновления применяются с помощью Rpmdrake, и я не столкнулся с проблемами с обновлениями системы. Во время тестового периода я получил обновления примерно для 50 пакетов, все из которых были применены быстро и аккуратно. Приятно отметить, что Rpmdrake сообщает вам, что вы должны перезагрузить систему после обновления ядра.
ROSA использует свои собственные репозитории. Список репозиториев включает в себя репозитории «Main», «Testing», «Non-free» и «Restricted». Насколько я могу судить, ROSA использует зеркала только в России (моя система получает все свое программное обеспечение с mirror.rosalab.ru/rosa/rosa2016.1/repository/, и единственным альтернативным зеркалом, которое я смог найти, был репозиторий yandex.ru).
Ошибки и недочеты
Ранее я упоминал, что столкнулся с несколькими неприятностями. Ни одна из них не была серьезной проблемой, но вместе они сделали использование ROSA не таким гладким, как я надеялся. Приведу несколько примеров:
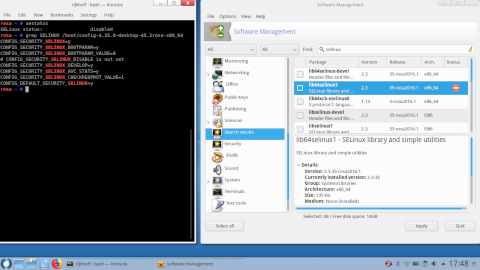
SELinux установлен, но ядро скомпилировано без поддержки SELinux. Я подозреваю, что корпоративные выпуски ROSA поставляются с ядром, поддерживающим SELinux, хотя я не могу утверждать это наверняка.
Когда я подключил внешний зашифрованный диск, ROSA не запрашивала у меня пароль для разблокировки диска. Единственный способ расшифровать диск - перейти к нему в файловом менеджере Dolphin. Точно так же менеджер паролей в командной строке каждый раз, когда я его использовал, спрашивал мой пароль GPG2 - в других дистрибутивах я должен вводить пароль только один раз во время сеанса.
Когда вы загрузите ROSA, он автоматически подключится к вашему Wi-Fi, но это будет сделано только после того, как вы введете свой пароль KWallet. В процессе вы получите три уведомления: одно говорит, что ваша беспроводная сеть деактивирована, одно - что «никакие секреты не были переданы» по вашей беспроводной сети, и, после ввода вашего пароля KWallet, уведомление о том, что ваша беспроводная сеть была активирована. Я бы предпочел, чтобы ROSA просто подключался к беспроводной сети, которую я настроил.
Уведомления иногда остаются на экране, пока вы не выделите их (щелкнув по уведомлению), а затем щелкнув где-нибудь еще (или нажав клавишу Esc). В других случаях уведомления отображаются в течение нескольких секунд.
Некоторые из этих проблем связаны с безопасностью и шифрованием, которое, по-видимому, не является предметом первой необходимости в ROSA. Другие проблемы, с которыми я столкнулся, вероятно, были специфичны для Plasma. Я подозреваю, что в Plasma может быть параметр, который изменяет поведение, скажем, уведомлений. Однако для новых пользователей поиск настроек в Plasma может быть сродни Гензелю и Гретель, которые ищут хлебные крошки в лесу. Например, я нашел меню «Event Notification and Actions», выполнив поиск по ключевому слову «notifications» в главном меню. В этом окне перечислены «источники событий», такие как «Archive Mail Agent», «KDE e-mail client» и «KMail», и для каждого источника вы видите «состояние», «заголовок» и (иногда) «описание». Честно говоря, я не понимаю большинство настроек и отказался от попыток настроить отображение уведомлений.
Выводы
Из того, что я прочитал о ROSA, я понял, что цель дистрибутива - быть удобной системой для обычных пользователей. Если это действительно то, к чему стремится ROSA, то она в основном достигает этой цели. Действительно, все же есть некоторые недочеты, есть много преимуществ, и мне много чего в этой системе нравится.
Для меня основной областью, где ROSA потерпел неудачу, является управление программным обеспечением. Rpmdrake неудобен в использовании, и менеджер пакетов urpmi, вероятно, будет пугающим для большинства новых пользователей. Центр программного обеспечения с поддержкой разных форматов пакетов, таких как Snaps и Flatpaks, был бы желанным улучшением.
Добавлять комментарии могут только зарегистрированные пользователи. [ Регистрация | Вход ]
Волк слабее льва и тигра, но в цирке волк не выступает! Волк - единственный из зверей, который может пойти в бой на более сильного противника.
Если же он проиграл бой, то до последнего вздоха смотрит в глаза противника. После этого умирает...
Администратор сайта laptop.ucoz.ru не несет ответственности за содержание рекламных объявлений. Все используемые на сайте зарегистрированные товарные знаки принадлежат своим законным владельцам! Используемая со сторонних источников информация публикуется с обязательными ссылками на эти источники.